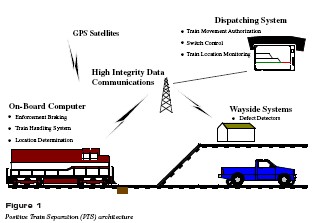
There is growing interest and activity among railroads, suppliers, and government agencies in the development of communications-based train control systems. These systems rely on sophisticated computers on board locomotives and at train control centers, combined with train location and navigation systems, and digital data communications links for the control of train operations (see Figure 1). They have the potential to maximize the use of railroad track and equipment and improve safety and service reliability. These systems would replace the conventional track-circuit-based signal systems and thereby allow safe operations with much shorter headways between trains to improve system throughput and increase track capacity. They would also enable the monitoring of train crews for compliance with computer-generated train movement authorities using the on-board computers and enforce compliance with automatic brake applications if these authorities are violated.
A key component of such systems is the locomotive navigation system. For the computer system to determine whether the train is in compliance with movement authorities, precise, real-time train location data are required, including identification of which track the train is on. GPS or DGPS alone does not provide the accuracy required, as trains often operate in multipletrack territory with track centers as close as 13 feet. Accordingly, there is a need for a low-cost alternative to conventional rate gyros or laser fiber optic gyros for precise navigation.
The objective of this project was to investigate the use of micro-electromechanical systems (MEMS) accelerometer arrays, combined with GPS, to provide the accurate location of locomotives.
This project examines the possibility of using an array of inexpensive MEMS accelerometers and integrating the accelerometer data with GPS or DGPS data using Kalman filtering techniques instead of the more expensive conventional accelerometers and gyros for locomotive navigation.