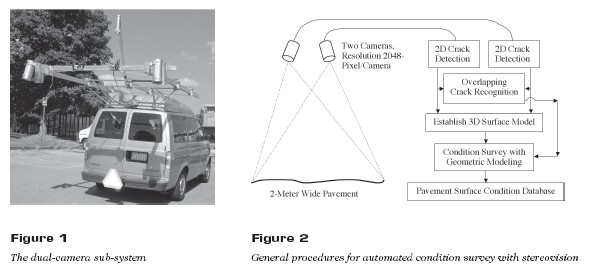
This project developed an automated and mobile high-speed and high-resolution pavement distress survey system for detecting cracks, rutting and roughness in three dimensions (Figures 1 and 2). Images of pavement surface were obtained through the simultaneous use of two cameras, each with a resolution of 1300 by 1024, and then combined to potentially achieve higher accuracy. Algorithms for 3-D pavement surface were developed. A computer code was written that included calibration program, distortion adjust program, matching program and some user interface. The algorithms needed further improvement to enhance accuracy. Initial tests have shown accuracy to be within 5 mm. After establishing 3-D geometric mode and necessary image resolution, algorithms for pavement cracks, rutting and roughness were implemented. Issues with accuracy of the pavement survey parameters and the hardware and software requirements for a real-time pavement survey system capable of traveling and collecting data at highway speeds still need to be fully addressed for the successful field implementation of this technology. The final report is available from the National Technical Information Service (NTIS # PB2004-106775).