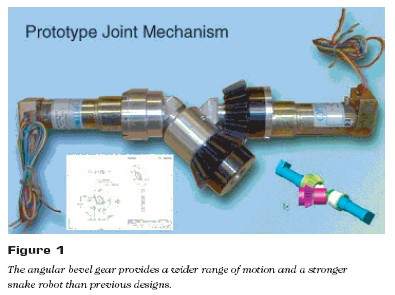
This project developed an automated remote-controlled bridge inspection technology with flexible, jointed serpentine robotic arms (Figure 1). These new types of robots have multiple joints that enable them to flex, reach and approach all points on the bridge. Algorithms for the serpentine motion control were developed for a working system. A new method for using roadmaps to perform path planning with snakes, based on density functions, was developed. An inspection of a highway bridge was conducted to determine issues with bridge inspection using serpentine robotic system. The bridge symmetry posed some problem for geometric algorithms that was successfully resolved. A new serpentine robot prototype was designed that represented an improvement over the previous serpentine mechanism developed by the Jet Propulsion Laboratory (JPL). This new design involves an angular bevel joint that utilizes a special kind of angular bevel gear that allows larger ranges of motion and produces a stronger snake robot. The principal investigator is pursuing a patent for this novel design. A new cellular decomposition suitable for motion planning of serpentine robots was developed. Work on path planning and control of serpentine robot has resulted in further improvements. Additional development and extensive laboratory and field testing will be needed for the implementation of this technology in the field.
The developments of this project form the first step towards the envisioned bridge inspection and other similar systems and are critical to the successful transfer to an application program in the field. The technology holds promise for other applications as well. The final report is available from the National Technical Information Service (NTIS # PB2001-104275).
The final report for this IDEA project can be found at:
https://onlinepubs.trb.org/onlinepubs/archive/studies/idea/finalreports/highway/NCHRP056_Final_Report.pdf

